Robotic manipulation
The robots perform manipulation tasks based on the contact information provided by the tactile sensors. The robot Obrero is capable of performing autonomous whole body grasps among other tasks. The robot Gobot is capable of perfoming precision manipulation relaying in tactile feedback. The robot Tactico is capable of working in more cluttered environments. For details refer to the individual links.

Robot Obrero
Obrero is the first robot using the algoritms of Sensitive Manipulation. These algoritms enabled by the hardware and the tactile sensors.
It has 6 DOF compliant arm and a 4 DOF compliant hand. The arm compliance is given by the series elastic actuators (SEAs).
The hand has two levels of compliance. One given by the SEAs and one by the tactile sensors.

Robot GoBot
The next step to test for Sensitive Manipulation was precision manipulation. In this approach tactile feedback allows the robot to manipulate small
and slippery objects (GO stones). The position of robot's fingers are not controllable with high precision. Therefore, the task excecution depends
on tactile feedback. The approach was succesfully tested.
Robot Tactile
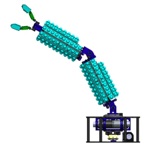
The succcesor of Obreo and Gobot. This robot was built to handle more complex tasks where the enviromnent is cluttered with objects. The robot arm and
and is covered by tactile sensors. The form factor is the one of an industrial arm. More details will be posted soon.